Assembling robotic hands – Kinetic Art
Now almost all the parts are produced, assembling the robotic hands can fully start, and the whole design comes into being.
First the previous made fingers and mechanism must be joint by the palm of the robotic hands. The palm is build up form aluminum and brass and custom machined parts. The top of the palm will be covered bij a specially shaped plate of 1mm brass.
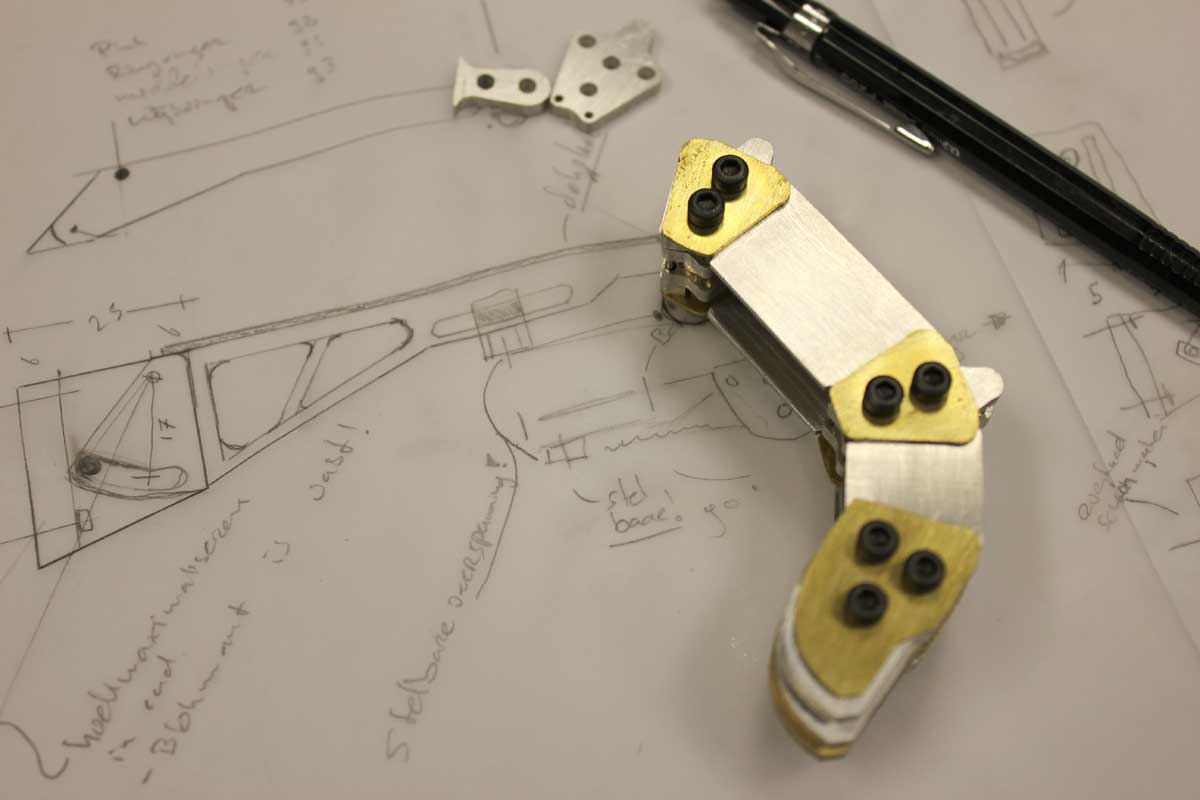

In this way it might just reminds one off a suit of armor, by the style of covering. The top plate is handcrafted form 1mm thick brass plate material. The place in witch the palm and mechanism are connected is formed by two 10mm thick aluminum plates. On these aluminum parts the bearings for de finger controlling cables will be mounted to.

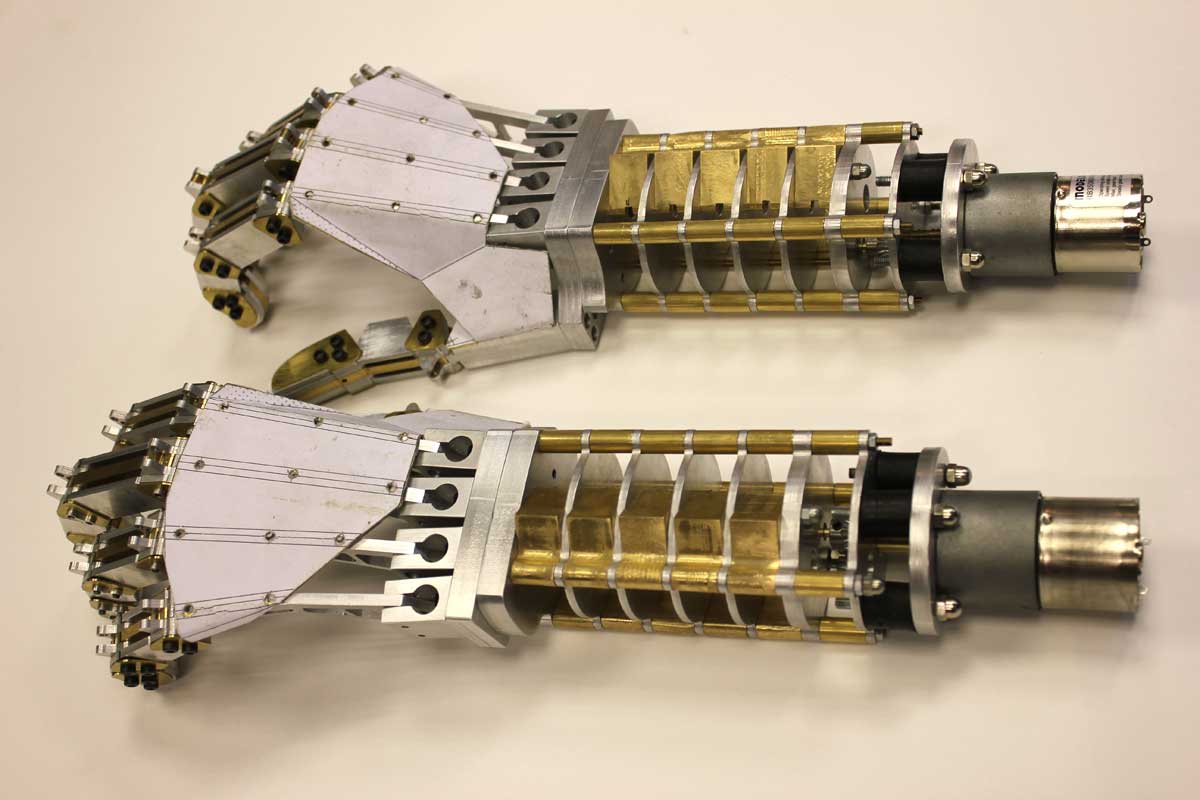
The completed assembly of the two robotic hands is taking shape. Its skeleton is ready and needs it’s mechanicals fitted to get it moving. The line that all the finger controlling cables will follow is calculated. All necessary miniature stainlessteel bearings can now be mounted.
1 Comment
Daniel Lofaro
March 22, 2018Hello, I am a professor in Robotics within the Engineering School at George Mason University and I making a robot for a project with my partners in Psychology. We are in need of good looking human “ish” like hands. Yours are absolutely beautiful. How much for two of them (one left and one right) where the distance from the bottom of the palm to end of the longest finger tip is 195mm (approx). Also what would the lead time on this be? I do not need the YAW motor on the back, just a way to mount the hand to an existing structure. We do need the fingers actuated.
Thank you for your time,
-Dan